A Dynamic Single Actuator Vertical Climbing Robot
Abstract—A climbing robot mechanism is introduced, whichuses dynamic movements to climb between two parallel verticalwalls. This robot relies on its own internal dynamic motionsto gain height, unlike previous mechanisms which are quasistatic.One benefit of dynamics is that it allows climbingwith only a single actuated degree of freedom. We showwith analysis, simulations and experiments that this dynamicrobot is capable of climbing vertically between parallel walls.We introduce simplifications that enable us to obtain closedform approximations of the robot motion. Furthermore, thisprovides us with some design considerations and insights intothe mechanism’s ability to climb.
http://www.cs.cmu.edu/~biorobotics/papers/IROS07_Degani_0490.pdf
3-D Snake Robot Motion: Nonsmooth Modeling,Simulations, and Experiments
Abstract—A nonsmooth (hybrid) 3-D mathematical model ofa snake robot (without wheels) is developed and experimentallyvalidated in this paper. The model is based on the framework ofnonsmooth dynamics and convex analysis that allows us to easilyand systematically incorporate unilateral contact forces (i.e., betweenthe snake robot and the ground surface) and friction forcesbased on Coulomb’s law of dry friction. Conventional numericalsolvers cannot be employed directly due to set-valued force lawsand possible instantaneous velocity changes. Therefore, we showhow to implement the model for numerical treatment with a numericalintegrator called the time-stepping method. This methodhelps to avoid explicit changes between equations during simulationeven though the system is hybrid. Simulation results for theserpentine motion pattern lateral undulation and sidewinding arepresented. In addition, experiments are performed with the snakerobot “Aiko” for locomotion by lateral undulation and sidewinding,both with isotropic friction. For these cases, back-to-back comparisonsbetween numerical results and experimental results are given.

Dynamic Analyze of Snake Robot

Optimal Gait Analysis of Snake Robot Dynamics
AmphiBot I: an amphibious snake-like robot

Analysis and Design of A Multi-Link Mobile Robot (Serpentine)
http://gicl.cs.drexel.edu/wiki-data/images/f/fc/AnalysisAndDesignOfAMulti-LinkMobileRobot(Serpentine).pdf
Abstract—A climbing robot mechanism is introduced, whichuses dynamic movements to climb between two parallel verticalwalls. This robot relies on its own internal dynamic motionsto gain height, unlike previous mechanisms which are quasistatic.One benefit of dynamics is that it allows climbingwith only a single actuated degree of freedom. We showwith analysis, simulations and experiments that this dynamicrobot is capable of climbing vertically between parallel walls.We introduce simplifications that enable us to obtain closedform approximations of the robot motion. Furthermore, thisprovides us with some design considerations and insights intothe mechanism’s ability to climb.
http://www.cs.cmu.edu/~biorobotics/papers/IROS07_Degani_0490.pdf
3-D Snake Robot Motion: Nonsmooth Modeling,Simulations, and Experiments
Abstract—A nonsmooth (hybrid) 3-D mathematical model ofa snake robot (without wheels) is developed and experimentallyvalidated in this paper. The model is based on the framework ofnonsmooth dynamics and convex analysis that allows us to easilyand systematically incorporate unilateral contact forces (i.e., betweenthe snake robot and the ground surface) and friction forcesbased on Coulomb’s law of dry friction. Conventional numericalsolvers cannot be employed directly due to set-valued force lawsand possible instantaneous velocity changes. Therefore, we showhow to implement the model for numerical treatment with a numericalintegrator called the time-stepping method. This methodhelps to avoid explicit changes between equations during simulationeven though the system is hybrid. Simulation results for theserpentine motion pattern lateral undulation and sidewinding arepresented. In addition, experiments are performed with the snakerobot “Aiko” for locomotion by lateral undulation and sidewinding,both with isotropic friction. For these cases, back-to-back comparisonsbetween numerical results and experimental results are given.

http://www.zfm.ethz.ch/~leine/papers/Transeth%20&%20Leine%20&%20Glocker%20&%20Pettersen%20-%203-D%20Snake%20Robot%20motion%20nonsmooth%20modeling%20simulations%20and%20experiments.pdf
Dynamic Analyze of Snake Robot
Abstract—Crawling movement as a motive mode seen in natureof some animals such as snakes possesses a specific syntactic anddynamic analysis. Serpentine robot designed by inspiration fromnature and snake’s crawling motion, is regarded as a crawling robot.In this paper, a serpentine robot with spiral motion model will beanalyzed. The purpose of this analysis is to calculate the vertical andtangential forces along snake’s body and to determine the parametersaffecting on these forces. Two types of serpentine robots have beendesigned in order to examine the achieved relations explained below.

http://www.waset.org/journals/waset/v29/v29-56.pdf
http://water.engr.psu.edu/reed/Education/CE%20563%20Projects/Mehta%20snakebot_nsga2%20%20Sp%2007.pdf Optimal Gait Analysis of Snake Robot Dynamics
ABSTRACT
Though there have been a lot of research in the area ofsnake-robot kinematics and dynamics, a little attention hasbeen given to ¯nd out an optimal gait for the robot. Thisoptimal gait until now is being calculated using a graphicalmethod. An attempt, here, is made to get these optimumgait parameters using evolutionary algorithms.We intend to optimize the input power consumed by therobot for a given propulsive speed. A popular multi-objectiveevolutionary algorithm developed by Deb et al., NSGA-II isused in this work and the results are presented.Results from an approximation of objective function throughpolynomials and from the actual simulation are presented.Two di®erent frictional models are considered and their re-sults are given. The results are in good agreement with theliterature. A parametric study is also included to ¯nd min-imum population size and number of generations. The per-formance metrics are used to justify the parametrization.
AmphiBot I: an amphibious snake-like robot
Abstract
This article presents a project that aims at constructing a biologically inspired amphibious snake-like robot. The robot isdesigned to be capable of anguilliform swimming like sea-snakes and lampreys in water and lateral undulatory locomotionlike a snake on ground. Both the structure and the controller of the robot are inspired by elongate vertebrates. In particular, thelocomotion of the robot is controlled by a central pattern generator (a system of coupled oscillators) that produces travellingwavesof oscillations as limit cycle behavior. We present the design considerations behind the robot and its controller. Experimentsare carried out to identify the types of travelling waves that optimize speed during lateral undulatory locomotion on ground. Inparticular, the optimal frequency, amplitude and wavelength are thus identified when the robot is crawling on a particular surface.

http://birg2.epfl.ch/publications/fulltext/crespi05.pdf
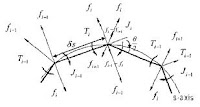
Analysis and Design of A Multi-Link Mobile Robot (Serpentine)
Abstract
This paper is a study on dynamic behavior of a :snakerobot, called Serpentine robot, 2”* version (SR#2). TheSR#2 is the latest version of snake robots developed atFIBO as a research platform for studying serpmtinegaits. The gait is in form of sinusoidal curve, consi,deredone of the most effectiveness crawling pattem i:n thenatural world. The Active Cord Mechanism (ACM)assumption, initiated by Hirose, is implemented. Therobot motion results from different joint torquer, andfrictional reacting forces in each wheel. In this stud:y, weproposed a modified serpeniod function with steeringcommand to control the robot’s direction. We alsoperformed dynamic analysis using Kane’s method.Holonomic constraints under frictional forces andnonholonomic constraints unders velocities wereconsidered. We verified our algorithm .for directionalcontrol on this Serpentine robot both simulation andexperiment.

http://gicl.cs.drexel.edu/wiki-data/images/f/fc/AnalysisAndDesignOfAMulti-LinkMobileRobot(Serpentine).pdf






No comments:
Post a Comment