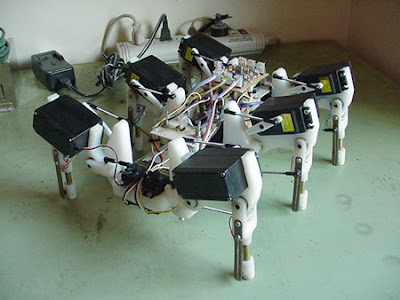
This Hexapod Robot created by Mike Smyth. It uses 12 R/C servos for actuators. The 6 that raise and lower the legs are Hobbico CS-72 1/4 scale and the 6 that move the legs forward and backward are several brands of standard 1/10 scale servos (all are similar the Futaba S3003). The total robot weight is a little over 5lbs and the payload capacity is around 5lbs additional. The vertical travel of the legs is 1 7/8". Overall length and width is 13" X 11". When crouching, it's 5.5" tall. When standing up there is 3.5" of ground clearance under the body.
There are actually two PIC16F84's on the hexapod. The main processor contains all of the walking code and generates positioning pulses for all 12 servos. Twelve of the 13 I/O lines are used for switch inputs - one on the bottom of each foot and a contact sensor in the front of each leg. The servo pulses are output sequentially on the last I/O line. All the second processor does is de-multiplex the pulses from the main processor and send them to the appropriate servo
tag : Robotic, PIC16F84 Project, Electronic Design, Microcontroller Project (src)





No comments:
Post a Comment