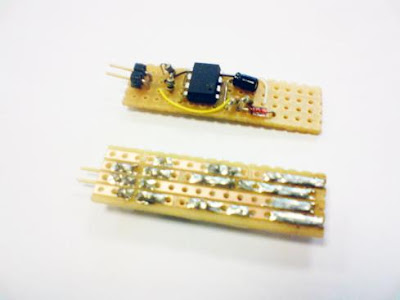
This simple microcontroller project build to create a keyboard hack that is smaller and cheaper and better reproducible than what one would get when hacking a keyboard circuit. a perfect solution for when you only want to use one switch in your prototype. The project utilize ATTiny45 as main controller.
This 1-Key-Keyboard Project can be plugged into any computer and will be recognised as a standard USB keyboard. When closing the switch, the keystroke ‘]’ will be sent. When opening the switch, the keystoke ‘[’ will be sent. Download : Source Code and schematic
related search : AVR microcontroller project, Simple Keyboard project, USB Interfacing (src)
Telecube modules are cube shaped modules with faces that can extend out doubling the length of any dimension. Each face "telescopes" out, thus the name. Each face also has a latching mechanism to attach or detach from any other face of a neighboring module. We have experimented with shape memory alloy and permanent switching magnet technologies in various versions of this system.
UWE investigates evolving 'swarm' robots The University of the West of England (UWE) is a partner in 'Symbrion', a ground breaking new European funded project, which will investigate the principles of how large groups (swarms) of robots can evolve and adapt together into different organisms based on bio-inspired approaches.
The aim of the project is to develop the novel principles behind the ways in which robots can evolve and work together in large 'swarms' so that – eventually - these can be applied to real-world applications. The swarms of robots are capable of forming themselves into a 'symbiotic artificial organism' and collectively interacting with the physical world using Sensors . http://info.uwe.ac.uk/news/uwenews/article.asp?item=1231
Self-assembling Robot Video
Robots with a mind of their own Video
Scientists are now building a new kind of robot capable of self-assembly and doing tasks too difficult or too dangerous for human beings.
Self-Replicating Repairing Robots Video Engineers at Cornell University have designed this odd-looking machine that can rebuild itself and also could perform repairs on itself.
MTRAN modular robots have been intensively investigated mainly by universities and research institutes in Japan and USA since around 1990 as the robots' versatility, flexibility and fault-tolerance has been attracting researchers' interest. Experiment of self-reconfiguration by 9 module As MTRAN is rather smaller and lighter than ever, both self-reconfiguration and dynamical motion of a group is made possible
PolyBot is made up of many repeated modules. Each module is virtually a robot in and of itself having a computer, a motor, Sensors and the ability to chains PolyBotattach to other modules. In some cases, power is supplied off board and passed from module to module. These modules attach together to form , which can be used like an arm or a leg or a finger depending on the task at hand.
Polypod is a bi-unit modular robot. This means that the robot is built up of exactly two types of modules that are repeated many times. This repetition makes manufacturing easier and cheaper. Dynamic reconfigurability allows the robot to be highly versatile, reconfiguring itself to whatever shape best suits the current task. To study this versatility, locomotion was chosen as the class of tasks for examination. http://www2.parc.com/spl/projects/modrobots/chain/polypod/index.html
Digital Clay
At Xerox PARC it is a subset of the modular robotics project. As such it is a stripped down version of a modular robot. That is, there is a) no active coupling and b) no actuation for producing module to module motions. Changes to an assembly of modules is made by a user. But it embodies one very important aspect—that the modules have some capacity to sense or know their own orientation in space with respect to other modules. As such it may be a useful hardware system for testing software, communications, power distribution for physically modular and reconfigurable systems. http://www2.parc.com/spl/projects/modrobots/lattice/digitalclay/index.html
Modular Snake Robots
Snake robots can use their many internal degrees of freedom to thread through tightly packed volumes accessing locations that people and machinery otherwise cannot use. Moreover, these highly articulated devices can coordinate their internal degrees of freedom to perform a variety of locomotion capabilities that go beyond the capabilities of conventional wheeled and the recently developed legged robots. The true power of these devices is that they are versatile, achieving behaviors not limited to crawling, climbing, and swimming.
The HoverBot C An Electrically Powered Flying Robot SUMMARY This paper describes the development of a fully autonomous or semi-autonomous hovering platform, capable of vertical lift-off and landing without a launcher, and capable of stationary hovering at one location. The idea to build such a model-sized aerial robot is not new; several other research institutes have been working on aerial robots based on commercially available, gasoline powered radio-control model helicopters. However, the aerial robot proposed here, called the HoverBot, has two distinguishing features: The HoverBot uses four rotor heads and four electric motors, making it whisper-quiet, easy-to-deploy, and even suitable for indoor applications. Special applications for the proposed HoverBot are inspection and surveillance tasks in nuclear power plants and waste storage facilities.
Without a skilled human pilot at the controls, the foremost problems in realizing a model helicopter-sized flying robot are stability and control. It is necessary to investigate the stability and control problems, define solutions to overcome these problems, and builde a prototype vehicle to demonstrate the feasibility of the solutions. The proposed HoverBot will have eight input Sensors for stability and control, and eight output actuators (4 motors and 4 servos for rotor pitch control). The resulting control system is a very complex, highly non-linear Multiple-Input Multiple-Output (MIMO) system, in which practically all input signals affect all output signals. A surprisingly simple experimental control method, called additive control, is proposed to control the system. This method was successfully used in the current experimental prototype of the HoverBot (although with fewer input signals). It is also proposed to investigate two alternative control methods, adaptive control and neural networks, both of which appear to be especially suitable for the Multiple-Input Multiple-Output control problem. If successful, the project will result not only in a working prototype of a flying robot, but it will also provide important insight into the functioning of various control methods for very complex MIMO systems.
Control of the HoverBot The control system of the HoverBot is designed to allow either fully autonomous operation or remote operation by an unskilled operator. To either, the HoverBot will appear as an omnidirectional vehicle with 4 degrees of freedom: (1) up/down (2) sideways, (3) forward/backward, and (4) horizontal rotation.
Creation of a Learning, Flying Robot by Means of Evolution Abstract We demonstrate the first instance of a real on-line robot learning to develop feasible flying (flapping) behavior, using evolution. Here we present the experiments and results of the first use of evolutionary methods for a flying robot. With nature's own method, evolution, we address the highly non-linear fluid dynamics of flying. The flying robot is constrained in a test bench where timing and movement of wing flapping is evolved to give maximal lifting force. The robot is assembled with standard o®-the-shelf R/C servomotors as actuators. The implementation is a conventional
steady-state linear evolutionary algorithm.
ROBOT Five servomotors are used for the robot. They are arranged in such a way that each of the two wings has three degrees of freedom. One servo controls the two wings forward/backward motion. Two servos control up/down motion and two small servos control the twist of the wings. The robot can slide vertically on two steel rods. The wings are made of balsa wood and solar, which is a thin, light air proof ¯lm used for model aircrafts, to keep them lightweight. They are as large as the servos can handle, 900 mm.
http://fy.chalmers.se/~wolff/AWNGecco2002.pdf
Energy-efficient Autonomous Four-rotor Flying Robot Controlled at 1 kHz Abstract—We describe an efficient, reliable, and robust fourrotor flying platform for indoor and outdoor navigation. Currently, similar platforms are controlled at low frequencies due to hardware and software limitations. This causes uncertainty in position control and instable behavior during fast maneuvers. Our flying platform offers a 1 kHz control frequency and motor update rate, in combination with powerful brushless DC motors in a light-weight package. Following a minimalistic design approach this system is based on a small number of lowcost components. Its robust performance is achieved by using simple but reliable highly optimized algorithms. The robot is small, light, and can carry payloads of up to 350g.
THE FOUR-ROTOR HARDWARE A. General design Our flying robot has a classical four rotor design with two counter rotating pairs of propellers arranged in a square and connected to the cross of the diagonals. The controller board, including the Sensors , is mounted in the middle of the cross together with the battery. The brushless controllers are mounted on top of the booms. Figure I shows a photograph of the flying robot. The weight without battery is 219g. The flight time depends on the payload and the battery. With a 3 cell 1800mAh LiPo battery and no payload the flight time is 30 minutes. We measured the thrust with a fully charged 3 cell LiPo (12.6V) at 330g per motor. With four motors the maximum available thrust is 1320g. Since the controllers need a certain margin to stabilize the robot also in extreme situations, not all the available thrust can be used for carrying payload. In addition, efficiency drops and as a consequence flight time decreases rapidly with a payload much larger than 350g. Because of this we rate our robot for a maximum payload of 350g.
With a 350g payload, a flight time of up to twelve minutes can be achieved. The maximum diameter of the robot without the propellers is 36.5cm. The propellers have a diameter of 19.8cm each. The Sensors used to stabilize the robot are very small and robust piezo gyros ENC-03R from Murata [14]. The second design iteration of this robot is already functional but not fully tested and characterized experimentally. This second version additionally has a three axial accelerometer and relies on datafusion algorithms, still running at 1kHz, to obtain absolute angles in pitch and roll.
The ROBUR project: towards an autonomous flapping-wing animat Abstract Flapping-wing flight is not applicable to huge aircrafts, but has a great potential for micro UAVs - as demonstrated by real birds, bats or flying insects. The ROBUR project aims at designing a robotic platform that will serve to better understand the design constraints that this flying mode entails, and to assess its capacity to foster autonomy and adaptation. The article describes the major components of the project, the tools that it will call upon, and its current state of achievement. Research on flapping flight maneuverability A generic model of a flapping wing aircraft has been designed, in which lifting surfaces are modelled by a set of articulated panels (figure 2). In a first stage, this model will be used to design a simple periodic controller for such a platform by using evolutionary algorithms (figure 3). This controller is expected to generate a periodic, horizontal, flapping flight at a constant speed.
New German UAV – microdrone A high technology very small UAV made in germany by microdrone GmbH. Can reach an altitude of 400m and stay in the sky for 30 minutes

















{kind=link}